ПОДХОД К ВЫБОРУ КРИТЕРИЯ ОПТИМАЛЬНОСТИ ПРИ СИНТЕЗЕ ТОПОЛОГИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ПОДВИЖНОЙ СВЯЗИ И НАВИГАЦИИ
Для определения положения объектов в настоящее время в основном используются спутниковые радионавигационные системы (СРНС). Однако возникают определенные проблемы использования радионавигационного поля на закрытых участках (в городах, туннелях, под мостами, в лесных массивах, горах, и т.п.), т.е. при низкой доступности для спутниковых радионавигационных систем. Поэтому для непрерывного определения местоположения подвижных объектов применение только СРНС не является достаточным.
Наиболее эффективно использование навигационного приемника работающего по двум существующим системам ГЛОНАСС и GPS. По известным оценкам выигрыш в доступности при использовании двухсистемных приемников достигает 30%. Однако недостатки, присущие СРНС, остаются прежними. Повысить доступность можно при совместном использовании радионавигационных систем, основанных на различных физических принципах.
Одним из направлений повышения доступности радионавигационных систем является разработка и применение интегрированных систем подвижной связи и навигации (ИСПСН).
Представляется целесообразным построение ИСПСН на основе СРНС и подсистемы определения местоположения (ПОМ) абонентов сети связи с подвижными объектами (ССПО). В этом случае интегрированная система будет обладать рядом новых системных параметров, которые могут быть противоречивы. Поэтому важным вопросом является выбор критериев синтеза топологии интегрированной системы.
Опыт разработки и эксплуатации сложных систем передачи информации показывает, что результаты поиска оптимальных решений определяются как адекватностью математических моделей процессам их функционирования, так и выбранным критерием оптимальности системы.
Рассмотрим основные подходы к выбору критерия оптимальности топологии ИСПСН. С одной стороны при выборе топологии необходимо обеспечить выполнения основной функции сети – предоставление услуги связи. С другой стороны, необходимо обеспечить выполнение требований, предъявляемых к системам навигации: доступность и точность определения местоположения подвижного объекта. Данные требования носят противоречивый, хотя и взаимосвязанный характер. Изменение количественной меры одного из них, как правило, приводит к изменению остальных.
Одним из общепринятых подходов к решению многокритериальных оптимизационных задач является выбор основного критерия и фиксация остальных в качестве ограничений. Применительно к оптимизации топологии ИСПСН выделяется три основных показателя: доступность D, точность определения местоположения подвижного объекта σ, стоимость сети связи C и коэффициент покрытия заданной территории.
Таким образом, критерий оптимальности топологии ССПО с услугой позиционирования может быть сформулирована следующим образом: для заданного ресурса ИСПСН определить ее топологию максимальной доступности, которая может обеспечить на заданном пространстве T0 определение местоположения подвижного объекта с требуемой точностью
(1)
(2)
где X = {x1, x2,…,xn} множество управляемых параметров; F(X) целевая функция.
Управляемыми параметрами задачи (1) являются: количество опорных станций; координаты их размещения на обслуживаемой территории, геометрический фактор системы, связывающий параметры точности и топологию размещения станции.
Так, например, при использовании разностно-дальномерного метода определения местоположения подвижного объекта необходимо обеспечить прием сигналов трёх опорных станций, что обеспечит размер рабочей зоны позиционирования, на которой выполняются требования по точности . Тогда вероятность приема n сигналов опорных станций, т.е. вероятности сложных событий будет иметь вид:
(3)
где m число требуемых опорных станций для обеспечения позиционирования; n– общее число опорных станций в сети (ресурс сети); pi вероятность приема сигнала от i-й опорной станции; qi = 1 – pi – вероятность не приема сигнала от i-й опорной станции.
Окончательно сформируем целевую функцию доступности для ИСПСН в целом, которая максимизирует вероятность того, что в любой точке заданной территории навигационные сигналы данной ПОМ пригодны для определения местоположения
(4)
где T=ab – количество точек сканирования на заданной территории обслуживания; (х,у) – координаты местоположения станций.
Таким образом, формализованная интерпретация физической постановки задачи следующая. Требуется найти такое местоположение опорных станций, которое максимизирует доступность ПОМ при выполнении остальных требований и ограничении на ресурс.
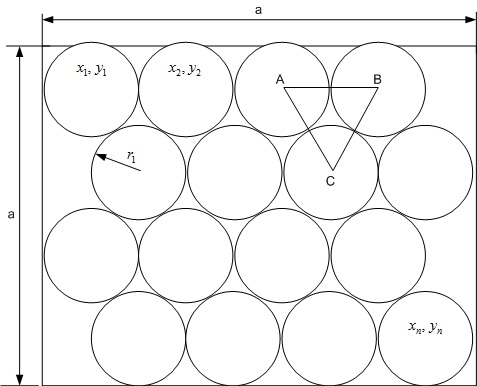
Из теории укладок и покрытий [] известно, что наибольшая плотность укладки кругов достигается, если треугольник АВС (рисунок 1) соединяющий центры 3-х соседних кругов – равносторонний. Плотность укладки (или коэффициент покрытия) при этом максимальная.
Параметры размещения определяются в результате решения задачи
(5)
где К – показатель четности ряда; К=1 – для четного ряда; К=0 – для нечетного ряда.
Рисунок 1 - Вариант геометрической структуры размещения ОС
Принцип равноудаленности соседних центров зон обслуживания используется для построения сотовых систем радиотелефонной связи [, ]. При этом обеспечивается максимальный коэффициент покрытия при минимуме зон обслуживания.
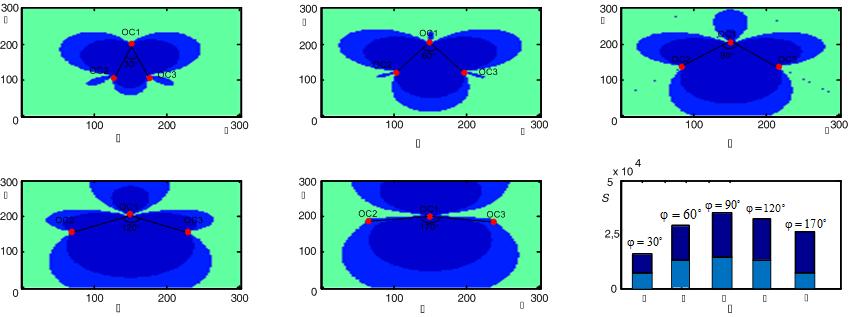
В работах [4,5] была разработана методика расчета рабочих зон позиционирования, а также рассмотрены и проанализированы различные варианты расположения опорных станций. Оптимальная структура ИСПСН отличается от стандартной структуры ССПО. При неизменности энергетических параметров и высоты подъема антенн радиус зоны обслуживания опорных станций уменьшится до 0,6R, а максимальная рабочая зона обеспечивается при угле (угол между базами) от 90° до 120°. На рисунках 2 а, б, в, г, д, е представлены рабочие зоны позиционирования при различных вариантах размещения опорных станций, их площади (рисунок 2 е).
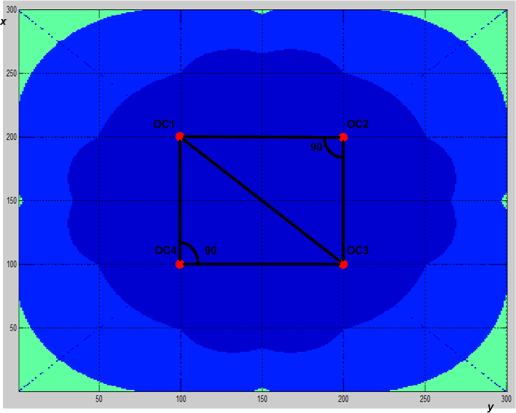
Из рисунка 2 е видно, что оптимальным вариантом размещения опорных станций будет случай, когда их центры образуют прямой равнобедренный треугольник. При добавлении 4-ой опорной станции их центры образуют квадрат, при таком варианте размещения опорных станций обеспечивается максимальная площадь рабочей зоны и оптимальный прием сигналов от опорных станций (минимум 3-х) в рабочей зоне (рисунок 3). И, соответственно, оптимальная структура размещения опорных станций (рисунка 1) преобразуется в структуру, представленную на рисунке 4.
Рисунок- 2 Рабочие зоны позиционирования
Рисунок 3 - Оптимальное размещение опорных станций
Рисунок 4 - Вариант геометрической структуры размещения опорных станций ССПО с услугой позиционирования
Тогда выражение расчета параметров размещения (5) преобразуется в выражение
,
(6)
которое позволяет оптимально разместить базовые станции ИСПСН для обеспечения требуемой доступности системы при минимальном затрате ресурса.
Таким образом, предложенный подход позволяет синтезировать оптимальную по выбранному критерию топологию ИСПСН.
СПИСОК ИСПОЛЬЗОВАНЫХ ИСТОЧНИКОВ
Роджерс К. Укладки и покрытия. –М.: Мир, 1968, 132с.
Будущее мобильной связи/ Под ред. Р. Лампрехта и А.А. Гоголя. – СПб: ИА «Энергомашиностроение», 2005. – 224 с.
Системы подвижной связи/ Под ред. А.И. Ледовского. – М.: Горячая линия – Телеком, 2006. – 536 с.
Снежко В.К. Прасько Г.А. О рабочих зонах позиционирования в сетях сухопутной подвижной радиосвязи. «Технологии и средства связи» №4 – 2008 г.
Снежко В.К. Прасько Г.А. Анализ рабочих зон позиционирования ССПР. «Технологии и средства связи» №3 – 2009 г.
Библиографическая ссылка
Мальцев А.Д., Прасько Г.А., Якушенко С.А. ПОДХОД К ВЫБОРУ КРИТЕРИЯ ОПТИМАЛЬНОСТИ ПРИ СИНТЕЗЕ ТОПОЛОГИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ПОДВИЖНОЙ СВЯЗИ И НАВИГАЦИИ // Научный электронный архив.
URL: http://econf.rae.ru/article/5746 (дата обращения: 25.04.2024).


 ,
,