АНАЛИЗ МОДЕЛЕЙ ОПЕРАТИВНОГО ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ГОРОДСКИМ ПАССАЖИРСКИМ ТРАНСПОРТОМ
Польгун М.Б., Воробьёва А.В., Остроух А.В.
В данной статье рассмотрены различные модели оперативного диспетчерского управления пассажирским транспортом. Проведен анализ сильных и слабых сторон каждой из моделей. А также рассмотрена программная реализация модели непрерывного определения положения транспортных средств на маршруте на примере одной из подсистем реальной автоматизированной системе диспетчерского управления «АСУ Навигация».
Одной из ведущих систем жизнеобеспечения любого города является пассажирский транспорт, предназначенный для обеспечения быстрого доступа граждан к основным услугам. По этой причине в настоящее время во всем мире широко развиваются системы диспетчерского управления пассажирским транспортом. Они предназначены в первую очередь для оперативного контроля, планирования и управления транспортными средствами автотранспортных предприятий.
В связи с постоянным ростом промышленности в России возрастает «неравномерная» (в течение суток) подвижность населения (пиковые нагрузки утром и вечером и отсутствие нагрузок в середине дня и ночью). Вследствие этого появляется необходимость более оперативно и полно удовлетворять растущие требования к работе пассажирского транспорта. Это усложняется массовой автомобилизацией, вызывающих перенасыщение городских дорог транспортом и автомобильные заторы, что существенно снижает эффективность работы пассажирского транспорта. Важнейшей задачей в данном случае является улучшение методов и средств диспетчерского управления процессом перевозки граждан. Сегодня это обеспечивается за счет создания современных транспортно-телематических систем (ТТС) пассажирского транспорта, базирующихся на применении технологий спутниковой навигации.
По способу обработки информации о положении транспортного средства (ТС) и привязки его к маршруту можно выделить три основные модели оперативного диспетчерского управления пассажирским транспортом:
Релейная модель (модель, основанная на контрольных пунктах);
Псевдоимпульсная модель;
Импульсная (цифровая) модель.
В случае релейной модели информации о положении транспортного средства поступает и обрабатывается только после прибытия транспортного средства на промежуточный или конечный контрольный пункт (КП). Таким образом, пока транспортное средство не попало в зону контрольного пункта, информация о его местонахождении и текущем состоянии остается неизвестным.
Рисунок 1. Схематическое отображение на мнемосхеме маршрута реализации релейной модели сбора и обработки информации
Этот подход широко используется в традиционных автоматизированных системах диспетчерского управления (АСДУ) и хорошо себя зарекомендовал при движении ТС в условиях ненапряженного транспортного потока. Однако, в современных условиях по причине многочисленных заторов на дорогах наблюдается значительно увеличение периода времени между поступлениями в систему информации о текущем состоянии ТС на маршруте.
Псевдоимпульсная модель используется во многих современных автоматизированных радионавигационных системах диспетчерского управления. При этом подходе информация поступает в систему с заданной периодичностью (обычно раз в минуту), но в обработке участвует та ее часть, которая попала в зону КП. Остальная часть данных используется для отображения ТС на электронной карте города. Таким образом, не взирая на то, что данные о положении ТС поступают в систему с постоянной периодичностью, автоматизированный контроль за движением ТС на маршруте по-прежнему осуществляется только по КП.
Рисунок 2. Схематическое отображение на мнемосхеме маршрута реализации псевдоимпульсной модели сбора и обработки информации
В случае цифровой модели вся поступающая навигационная информация сразу же обрабатывается и используется для непрерывного определения местоположения и текущего состояния ТС на маршруте.
Рисунок 3. Схематическое отображение на мнемосхеме маршрута реализации цифровой модели сбора и обработки информации
Данная модель требует более сложного описания точек контроля, так как оценивает характеристики движения пассажирского транспортного средства в любой точке маршрута, а не только в зоне КП.
Все традиционный АСДУ осуществляют контроль за ТС на маршруте по двум или более остановкам, которые совпадают с контрольными пунктами. Обычно контрольными пунктами являются конечные, а также одна или несколько промежуточных остановок на маршруте. Диспетчер принимает решение по управлению перевозочным процессом, опираясь на информацию о фактическом времени прохождения ТС данных КП. Получая информацию только в нескольких точках маршрута, трудно оценить состояние перевозочного процесса в целом. Отсутствие оперативной информации влечет за собой неэффективное диспетчерское управление и недостаточное качество информирования пассажиров.
В зависимости движения пассажирских транспортных средств относительно планово расписания, можно рассмотреть три случая:
отставание от планового расписания;
опережение планово расписания;
движение, соответствующее плановому расписанию.
Проведенные исследования показали, что в первых двух случаях дискретная модель является более точной. А в случае движения ТС в соответствии с плановым расписанием обработка данных на основе релейной модели может дать более точный результат, за счет излишней чувствительности системы в случае использования цифровой модели. За счет той же чувствительности релейная модель дает более точные результаты в случае значительного опережения планового интервала.
В современной автоматизированной системе диспетчерского управления «АСУ Навигация», разработанной компанией «НПП Транснавигация» для определения местоположения пассажирского транспорта применяются псевдоимпульсная и цифровая модели. Для реализации цифровой модели была разработанная непрерывная математическая модель (НММ), и затем специальная подсистема АСДУ для определения местоположения ТС и его фактических интервалов движения.
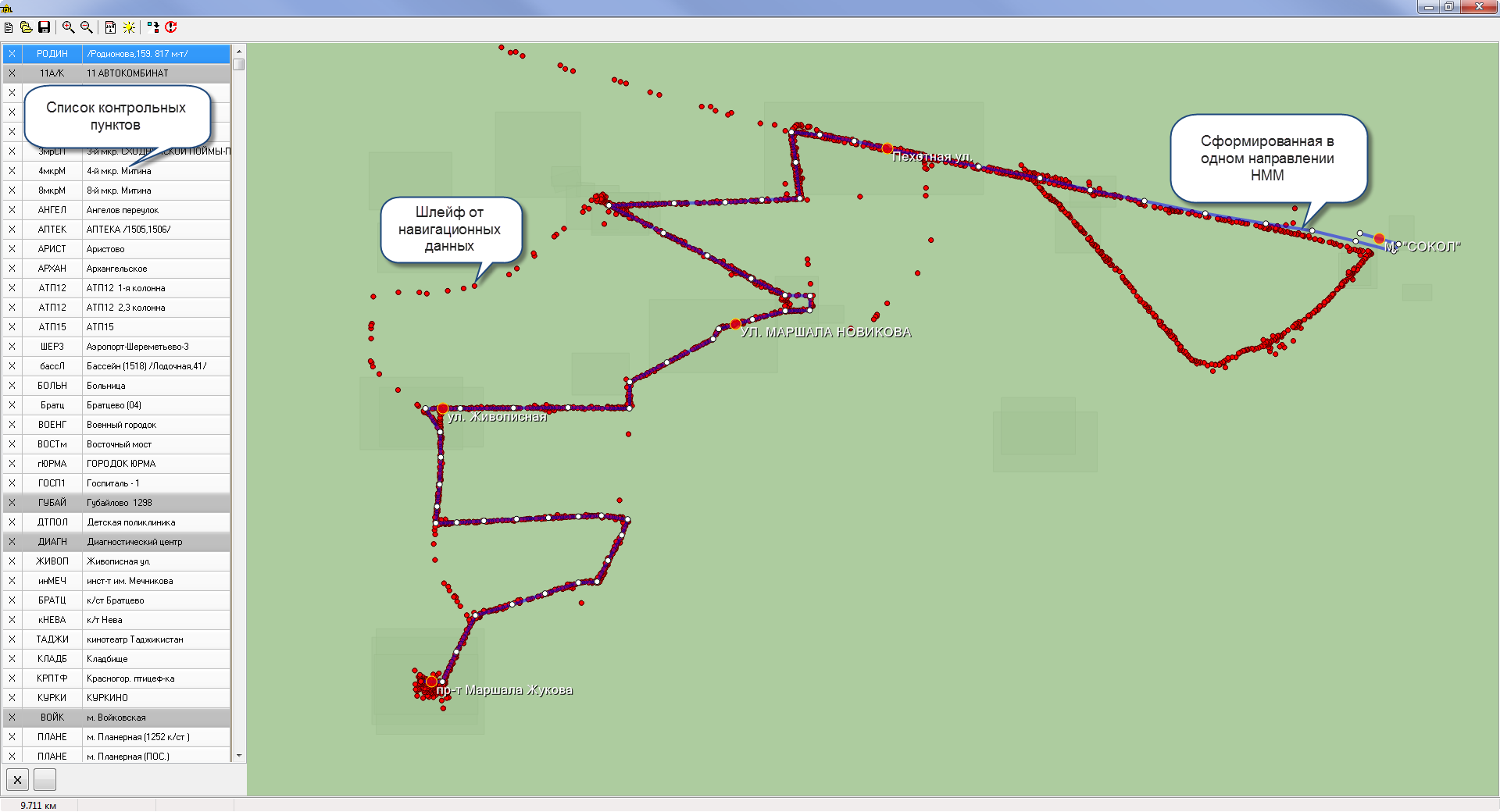
При работе диспетчерской системы на основе НММ участниками контроля являются отрезки этой модели. Для этого в программном комплексе «АСУ Навигация» строится кусочно-ломаная линия НММ. Процесс построения следующий:
В программе выбирается набор навигационных отметок транспортных средств, движущихся по определенному маршруту, за определенную дату и время. Эти отметки отображаются в виде точек на карте города.
Через наибольшие скопления навигационных отметок проводятся линии, из которых будет состоять НММ.
Для каждого типа рейса строится НММ. В случае простого кругового маршрута строится модель для прямого и обратного рейсов.
Рисунок 4. Программный интерфейс для подготовки маршрутной сети в диспетчерской системе, работающей по НММ
Также в состав «АСУ Навигация» был включен дополнительный программный комплекс, позволяющий в удобном графическом виде отображать текущее состояние всех транспортный средств на маршруте движения. На каждом рабочем месте диспетчера на основе использования второго экрана обеспечено непрерывное графическое отображение фактических интервалов движения ТС на контролируемых маршрутах, выполненное в виде мнемосхемы движения.
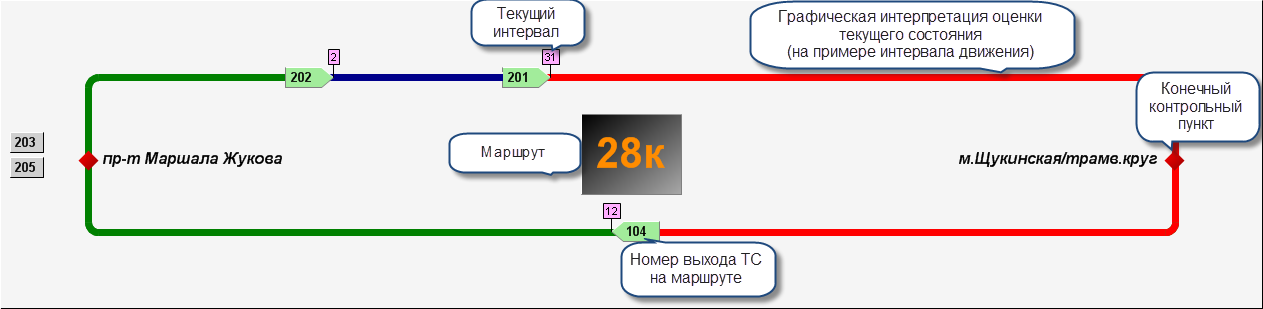
Рисунок 5. Программная реализация мнемосхемы движения ТС на маршруте
Каждый контролируемый маршрут представлен на мнемосхеме овалом, верхняя часть которого показывает ситуацию на прямом рейсе, а нижняя – на обратном. Конечные пункты A и B представлены точками на овале в местах пересечения воображаемой горизонтальной оси симметрии с овалом. Слева – пункт A, справа – пункт B.
Транспортные средства в процессе движения представлены на мнемосхеме в виде направленных прямоугольников зеленого цвета, в которых указан номер выхода. Позиция ТС на мнемосхеме показывает процентное соотношение прохождения маршрута от начальной точки.
При нахождении ТС в конечных пунктах маршрута, они отображаются в виде серых прямоугольников, изображенных рядом с соответствующим конечным пунктом. Если ТС на момент отображения выполняет нулевой рейс из парка на начальную точку маршрута или в парк от конечной точки маршрута, то прямоугольник серого цвета отображается в правом верхнем углу окна отображения маршрута.
Положения ТС, их плановый и фактический интервалы движения, а также состояние определяются один раз в минуту. Для удобства обнаружения проблемных мест на маршруте, отклонение текущего состояния движения на маршруте от плановых показателей отображается в графическом виде. В зависимости от отклонения фактического интервала движения от плановых значений, отрезки овала принимают один из трех цветов:
зеленый (интервал 100% плана +/- 25% планового интервала);
красный (увеличенный интервал: 175% и более от планово интервала);
синий (укороченный интервал: 75% и мене от планового интервала).
В комплексе программ предусмотрены режимы ступенчатого масштабирования отображения транспортных средств и связанные с ними уровни генерализации, при переключении между которыми одновременно отображается 1, 3, 6и 9 маршрутов соответственно. С ростом количества одновременно отображаемых маршрутов снижается подробность информации по каждому из них.
Заключение
Каждая из перечисленных моделей оперативного диспетчерского управления пассажирским транспортом имеет свои преимущества и недостатки. При использовании только одной модели в системе, система неизбежно будет выдавать ошибочные результаты, приводящие в конечном итоге к неверному и несвоевременному информированию пассажиров. Для того чтобы избежать неточностей и ошибок в определения местоположения пассажирского транспорта на маршруте следования необходимо использовать как минимум две (псевдоимпульсную и цифровую) модели в совокупности.
Список информационных источников
Ожерельев М.Ю. Методика формирования цифровой модели маршрута городского пассажирского транспорта на основе статистического анализа навигационной информации, полученной от транспортных средств / Богумил В.Н., Ожерельев
Ожерельев М.Ю. // Деп. в ВНИТИ РАН 03.12.04 №1916-В2004. – М.: МАДИ (ГТУ), 2004
Ожерельев М.Ю. Совершенствование информирования пассажиров в транспортно-телематических системах городского пассажирского транспорта / Ефименко Д.Б., Ожерельев М.Ю. Журнал «Автотранспортное предприятие» №6 – 2008.
Информационный ресурс: transnavi.ru
Библиографическая ссылка
Польгун М.Б., Воробьёва А.В., Остроух А.В. АНАЛИЗ МОДЕЛЕЙ ОПЕРАТИВНОГО ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ГОРОДСКИМ ПАССАЖИРСКИМ ТРАНСПОРТОМ // Научный электронный архив.
URL: http://econf.rae.ru/article/5963 (дата обращения: 20.04.2024).