ПОСТРОЕНИЕ МОДЕЛЕЙ ДЕГРАДАЦИИ СИСТЕМ НА ОСНОВЕ БАЙЕСОВСКОГО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СОСТАВЛЯЮЩИХ КОМПОНЕНТ.
Н.Н. Портнягин, Г.А. Пюкке, Т.И. Горева.
В настоящей статье авторы предпринимают попытку дать описание процесса деградации технических систем на основе использования случайных процессов. Под деградацией системы будем понимать, развивающийся во времени, физический процесс накопления отказов составляющих компонент в объекте диагностирования. Под дефектом будем понимать выход значения диагностируемого параметра компоненты за установленные пределы.
При такой постановке задачи нарастающий поток дефектов может быть моделирован как поток случайных событий. Для аналитического описания процесса авторами был выбран пуассоновский (простейший, обладающий свойствами ординарности, отсутствия последействия и стационарности) поток. Такой выбор объясняется тем обстоятельством, что в теории потоков имеет место предельная теорема, согласно которой сумма большого числа независимых потоков с любым законом распределения приближается к простейшему потоку с ростом числа слагаемых потоков (такая методология общепринята и позволяет избегать сложных громоздких представлений).
Как известно, простейший поток событий может быть описан системой линейных дифференциальных уравнений Чемпмена-Колмогорова (1), т. е. возможно исследовать пуассоновский поток с помощью методов теории марковских процессов [1].
(1)
P0’ (τ) = −λ P0(τ)
Pn’ (τ) = −λ Pn(τ) + λ Pn-1(τ),
где n – количество событий на интервале τ; Pn(τ) – вероятность того, что на интервале τ произошло n событий; P0(τ) – вероятность того, что на интервале τ не произошло ни одного события; λ – интенсивность потока событий.
Система является дифференциально-разностным уравнением: дифференциальное относительно τ и разностное относительно n. Решение таких систем может быть выполнено с помощью производящих функций и, для данной системы, представляет собой пуассоновское распределение:
Pn(τ) = ((λ τ)n/ n !) e-λτ,n = 0, 1, 2,…..
Случайная величина промежутка времени между двумя произвольными соседними событиями в простейшем потоке определяется экспоненциальным законом распределения:
f(t) = λ e-λτ
Интенсивность потока событий (среднее количество отказов за единицу времени) λ, определяющая характер марковского процесса, является среднестатистической детерминированной величиной, значение которой зависит от условий изготовления и эксплуатации составляющих компонент, партии изготовления и многих других факторов (величина, обратная λ – среднее время наработки до отказа приводится в паспортных данных). Поэтому на момент диагностирования интенсивность потока отказов составляющих компонент может иметь совсем иное значение.
Модель с использованием паспортных значений интенсивности потока отказов будем называть априорной моделью деградации.
Для определения значения λ, близкого к истинному, и соответственно построения модели более адекватной физическому объекту авторами предусмотрена процедура оценивания. Данные об объекте диагностирования, используемые в дальнейшем для построения апостериорной (более адекватной, получаемой после использования информации от объекта исследования) модели, будем получать на основе измерений диагностических признаков на объекте диагностирования и использования изоварной [2, 3] модели объекта диагностирования.
Возможность моделирования физического потока отказов марковскими процессами процедура общеизвестная. Обоснование ее применения приводится во многих работах по технической диагностике [4]. В этих работах постулируется независимость перехода физической системы из предыдущего состояния в последующее при возникновении очередного дефекта от предыстории событий. В таком процессе будущее состояние определяется только настоящим состоянием, а такая последовательность состояний во времени может быть описана марковским процессом.
Вся трудность такого представления состоит в определении параметров случайного процесса. Выполним исследование пуассоновского потока с помощью методов теории марковских процессов. Пусть система может находиться в состояниях Ек, где к = 0, 1, 2, ……… Обозначим вероятность нахождения системы в конкретном состоянии в момент времени t через Pn(t).
Используя систему (1) и связь между плотностью потока событий и вероятностью можно записать частный случай системы (1):
Pn(t + 1) = Pn(t) Pkn , n = 0, 1, 2,……,
который означает, что система может оказаться в состоянии n путем одного из многих к несовместных переходов. Система может быть записана в матричной форме:
P(t + 1) = P(t)J,
где J - стохастическая матрица переходов, образованная из элементов Pkn, удовлетворяющих условиям
Pkn = 1, 0 ≤Pkn ≤ 1
В частности можно записать:
P(t) = P(0) Jt,
где P(0) – вектор начальных условий.
Процесс деградации при отсутствии восстановительных процедур будет сходиться к конечному состоянию максимально возможного количества отказов. Случайный поток событий можно описывать числом отказов N(t), появляющихся на интервале времени от 0 до t. Для пуассоновского считающего стационарного процесса вероятность появления k событий в конечном интервале (0; t] определяется соотношением:
pk= P{N(t) = k}, k = 1, 2, … .
Число событий в интервале (t1, t2] равно N(t2) – N(t1). Интенсивность потока отказов постоянна: λ = const, (т. е. рассматриваются только периоды стационарности), а число отказов на конечном интервале времени τ является дискретной случайной величиной k с законом распределения: Пуассона
pk(τ)=[(λτ)k/ k!]exp(-λτ),
где λτ – среднее число событий, приходящихся на участок τ.
Вероятность отсутствия отказов на интервале τ распределена по закону:
p0 (τ) = exp((-λτ),
соответственно, закон распределения единичных отказов:
p1(τ) = λτ exp((-λτ),
двойных отказов:
p2 (τ) =(( λτ)2⁄ 2!)exp((-λτ) и т. д.
Если рассмотреть все возможные сочетания отказов, то на основе комбинаторных соотношений можно определить количество возможных состояний системы:
Сm0 + Cm1 + Cm2 + ………+Cmm = 2m,
где Сmn= (1/n!)[m(m – 1)(m – 2) ……..(m – n + 1) – количество сочетаний из m элементов по n; m – количество компонент схемы; n= 1, 2, …., m. Сm0 – количество состояний отсутствия дефектов; Cm1 – количество состояний одиночных дефектов; Сm2- количество состояний двойных дефектов; и т. д…. Cmm– количество состояний m – кратных дефектов.
Соответствующий граф состояний для простейшего потока событий должен быть преобразован в граф, включающий все обозначенные подсостояния, с учетом условия ординарности потока событий.
Квазидиагональная матрица единичных скачков по состояниям преобразуется в матрицу единичных скачков по подсостояниям. Для построения размеченного графа состояний системы необходимо проанализировать все разрешенные переходы (ординарность) системы из состояния в состояние на основе логического анализа процесса и условии ординарности потока событий.
Построение графа состояний включает перечисление всех возможных сочетаний отказов Si; i = 0, (2m– 1) составляющих структурных единиц (СЕ), установление всех разрешенных переходов и вычисления вероятностей этих переходов. При анализе цепей достаточно высокой размерности процедуру формирования графа состояний необходимо формализовать.
Введем новую величину: характеристику текущего состояния α, представляющую собой дробь, в числитель которой будут входить индексы отказавших СЕ, а в знаменатель СЕ, сохранивших работоспособность. Обозначим характеристику начального состояния работоспособности всех m СЕ через:
α(0) = .
Алгоритм формирования множества возможных состояний системы начинается с α(0) и включает совокупность операций пошагового перемещения (инверсии) индексов из знаменателя в числитель с возвращением их в знаменатель на каждом очередном этапе инверсии. Алгоритм сходится к конечному состоянию неработоспособности всех СЕ с характеристикой:
α(2m- 1) =.
При машинной обработке данных, массив всех состояний системы
S(0); S(1); S(2)…………;S(2m– 1)
формируется на основе стандартной программы комбинаторного преобразования всех возможных сочетаний индексов 1, 2,…..,m из mэлементов по i, гдеi = 1, m, кодирующих неработоспособные состояния системы.
После перечисления всех возможных состояний системы устанавливаются все разрешенные переходы. Алгоритм вычисления разрешенных переходов выполняет сравнение характеристик предыдущих и последующих состояний, при этом каждая из характеристик подмножества k – кратных дефектов сравнивается со всеми характеристиками подмножества k + 1 – кратных дефектов (k = 0, 1, 2,……m – 1). Наличие разрешенного перехода определяется по отсутствию в знаменателе характеристики из подмножества (k + 1) – кратных дефектов совокупности цифр, принадлежащих числителю характеристики из подмножества k – кратных дефектов. В противном случае переход не устанавливается.
Полученный граф будет иметь m + 1 подмножеств вершин, соответствующих дефектам различной кратности: S0– отсутствия дефектов; S1– одиночных дефектов; S2– двойных дефектов и т. д. Sm– m кратных дефектов. Количество разрешенных переходов, приходящихся на каждое состояние данной кратности будет убывать на единицу при переходе от подмножества кратности k к подмножеству кратности k + 1, где нижний индекс при S соответствует кратности дефекта, а индекс в скобках номеру состояния в подмножестве дефектов данной кратности. Величины (m, m-1,……, 2, 1, 0) – количества разрешенных переходов для каждого из состояний данной кратности. Общий вид графа на рис. 1.
Рис. 1. Общий вид графа состояний системы
На основе полученного графа строится матрица вероятностей переходов J.
Например, для трехкомпонентной системы, имеющей 8 возможных состояний, в каждом из которых система может находиться с определенной вероятностью, распределение по подмножествам нулевых, одиночных, двойных и тройных дефектов составит: С30 = 1; С31 = 3; С32 = 3; С33 = 1. Соответственно, характеристики текущего состояния системы распределятся по подмножествам k – кратных дефектов. На основе введенного критерия вычисления разрешенных переходов строится граф состояний системы. На основе полученного графа строится матрица вероятностей переходов J).
Наличие разрешенного перехода определяется по отсутствию в знаменателе характеристики из подмножества (k + 1) – кратных дефектов совокупности цифр, принадлежащих числителю характеристики из подмножества k – кратных дефектов. При заданных значениях времени наработки до отказа: t1* = 104 ч; t2* = 1.25 ∙104 ч; t3* = 0.8 ∙ 104 ч (паспортные данные), интенсивность отказав компонент будут составлять λ1 = 10-4 ч-1 ; λ2 = 0.8 ∙ 10-4 ч-1; λ3 = 1.25 ∙ 10-4 ч-1. Соответственно, значения коэффициентов матрица при выбранном шаге дискретизации времени Δt = 10 2 ч, будут составлять:
J =
.
Процесс деградации при отсутствии восстановительных процедур будет определяться текущими значениями компонент вектора вероятностей состояний P(t) = P(0) Jt, исходное состояние будет характеризоваться вектором P(0)= [1 0 0 0 0 0 0 0]. Машинная обработка данных в среде MATLAB при ручном формировании матрицы J дает возможность построить зависимости изменения вероятностей по каждому из восьми состояний во времени.
На рис. 2 приведена распечатка графиков изменения вероятностей отказов различной кратности во времени.
P(t)
t102ч
Рис. 2. Результаты реализации программы построения графиков изменения вероятностей по каждому из состояний системы.
Кривая 1 интерпретирует изменение во времени вероятности работоспособного состояния объекта; кривые 2, 3, 4 - это зависимости изменения состояний одиночных отказов от времени; кривые 5, 6, 7 - это зависимости изменения состояний двойных отказов от времени. Следует отметить, что кривые, принадлежащие отказам одинаковой кратности сдвинуты во времени в силу различной интенсивности отказов λ у составляющих компонент. Группы кривых, принадлежащие различным кратностям отказов сдвинуты во времени в силу накопительного характера процесса.
Если в развивающемся во времени процессе фиксировать отдельные моменты времени, кратные 10 2 ч, то каждый раз будем получать значения компонент текущего вектора вероятностей состояний P(t), соответствующие данному зафиксированному моменту времени. Фрагменты распечатки выборок процесса деградации, где строки являются векторами сечения процесса в точках 3710 2 ч, 3910 2 ч, 4210 2 ч и 9810 2 ч, 10910 2 ч, 119 10 2 ч. В полученном массиве по горизонтали распределены вероятности нулевых, единичных, двойных и тройных отказов для данного зафиксированного момента времени. Соответствующие максимумы вероятностей одиночных и двойных отказов во времени распределены по вертикали.
Как было отмечено выше, для построения апостериорной модели деградации системы используется процедура оценивания и изоварная модель диагностирования [2, 3], которая связывает диагностические признаки К1, К2, измеряемые на объекте диагностирования и диагностируемые параметры gi, не измеряемые непосредственно. Тогда при различных сочетаниях вариаций параметров компонент gi наблюдается статистическая устойчивость распределения вероятностей конечных положений точки состояния системы в пространстве {К1, К2}. Такая закономерность обусловлена наложением в каждой точке плоскости К1, К2на точки данной кратности вариации точек вариации более высокого порядка кратности. Это дает возможность построения в пространстве диагностирования совокупности областей работоспособности объекта с заданным порогом вероятности. Расположение максимумов различной кратности вариаций на плоскости К1, К2 зависит от топологии изоварной картины, которая в свою очередь зависит от топологии объекта и варианта картины, выбранного по оптимизационным критериям (чувствительности, равномерности чувствительности, эквидистантности)[2, 3].
Процедура построения апостериорной модели деградации системы базируется на идее согласования динамической априорной марковской модели деградации с изоварной моделью. Марковская модель описывает развитие системы на конечном интервале времени, в пределах которого вероятностный процесс носит стационарный характер. В отличие от марковской, изоварная модель строится на основе информации о топологии конкретного объекта. Эту информацию можно использовать для адаптации вероятностного процесса деградации к диагностируемому объекту, с целью получения модели более адекватно описывающей динамический процесс старения системы. После согласования моделей (изоварной и априорной марковской) вычисляются изменения условных вероятностей во времени по всем 2m состояниям.
После проведения опыта на изоварной модели необходимо пересмотреть вероятности гипотез Р(В1), Р(В2),…., Р(Вn) с учетем информации полученной от изоварной модели.
Другими словами, необходимо найти апостериорные вероятности гипотез появления кратных отказов или их отсутствия, при условии, что в результате измерения на изоварной модели появилось событие А, состоящее в регистрации отказа той или иной кратности:
РА (В1), РА(В2),…., РА(Вn).
P(Bi) PBi(A)
При этом, вектор РВi(А) условных вероятностей наступления события А при выполнении гипотез Biуже известен при измерениях на изоварной модели. Вероятности вычисляются для каждой компоненты вектора вероятностей состояний. В результате становятся известными компоненты вектора апостериорных вероятностей.
PA(Bi) =
(2)
P(B1) PB1(A) + P(B2) PB2(A) + …….+ P(Bn ) PBn(A)
Для нахождения апостериорных вероятностей запишем соотношение (2) для случая условных и априорных вероятностей, определяемых изоварной и марковской моделями соответственно.
(3)
K = Cm2;……;R = Cmm-1 – комбинаторные сочетания – числа определяющие количество слагаемых в выражении (3) по вариациям различной кратности.
P(Bi) – вероятность наступления одной из вариаций i– й кратности,
i = 0, 1, …, m;
PBi(A) – условная вероятность попадания в точку с координатами (К1,К2), при разыгрывании случайной величины параметра компонент ОД, при условии выполнения одной из вариаций i– й кратности.
А – событие, состоящее в том что текущее состояние принадлежит точке с координатами (К1, К2).
Bi– событие, состоящее в наступлении одной из вариаций i – й кратности.
В0, В11, В12,……,Вm– образуют полную группу событий.
PA(Bi)– апостериорная условная вероятность того, что текущее состояние, соответствующее одной из вариаций i – й кратности принадлежит точке с координатами (К1, К2).
Коррекцию численных значений величин интенсивностей отказов λiможно выполнить посредством минимизации функционала расхождения векторов апостериорных и априорных вероятностей состояний системы во времени
λ
| Рапостер i(k ∆t; λ) – Pаприор i(k ∆t; λ) | min.
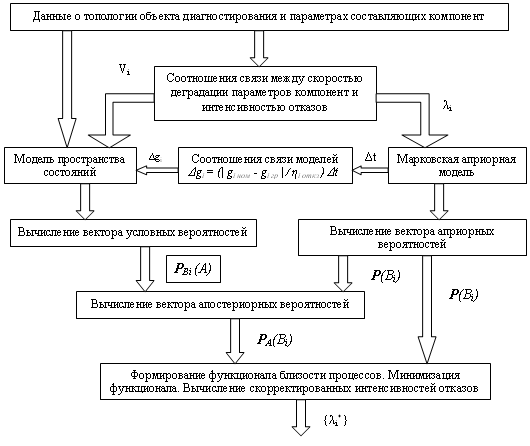
На Рис. 3 приведен алгоритм формирования вектора апостериорных вероятностей состояний системы, описывающей динамический процесс старения системы. Вектор строится на основе информации получаемой от конкретного объекта диагностирования, при использовании модели пространства состояния (изоварная модель) для построения вектора условных вероятностей состояний системы.
С другой стороны задается вектор априорных вероятностей состояний системы, построенный на основе марковской модели и отражающий общие тенденции развития систем, с использованием статистических данных о показателях надежности составляющих компонент, рассматриваемой системы.
Рис. 3. Алгоритм формирования вектора апостериорных вероятностей
Использование соотношений связи моделей дает возможность синхронизировать процесс и вычислить компоненты вектора апостериорных вероятностей, дать объективную оценку расхождения процессов и вычислить значения интенсивностей отказов, соответствующие минимуму функционала близости.
Таким образом, рассмотренная методика дает возможность при байесовском оценивании определять апостериорное распределение вероятностей состояний системы. Такой подход позволяет постоянно уточнять информацию об интересующих параметрах надежности и создает объективную основу для принятия решений при наличии неполной информации о параметрах надежности системы и составляющих ее компонент. Использование полученных моделей при поэтапном отслеживании и уточнении информации о характеристиках надежности объекта позволило свести задачу принятия решений к классу марковских процессов. Марковские модели надежности, рассмотренные в данной статье могут быть использованы для описания поведения системы и определения среднего времени наступления возможного отказа.
Класс объектов - технические системы, которые могут быть представлены электрическими цепями и описаны линеаризованными уравнениями, содержащие как линейные, так и нелинейные компоненты, но позволяющие выполнять квазилинейный режим проведения диагностического эксперимента (например, электрические средства автоматизации).
ЛИТЕРАТУРА
И. К. Волков, С. М. Зуев, Г. М. Цветкова. Случайные процессы. М.: МГТУ им. Н. Э. Баумана. – 2000. 446 с.
Портнягин Н. Н., Пюкке Г. А. Теория, методы и эксперименты решения задач диагностики судовых электрических средств автоматизации. Спб.: Судостроение. – 2004. – 162 с.
Пюкке Г. А. Метод построения вероятностной области работоспособности судовых электрических средств автоматизации на основе изоварной модели. – Петропавловск – Камчатский, КамчатГТУ, Изд. «Вестник камчатского государственного технического университета». – 2003. – с. 51 – 62.
Калявин В. П., Малышев А. М., Мозгалевский А. В. Организация систем диагностирования судового оборудования. – Л. : Судостроение, 1991. – 168 с.
Библиографическая ссылка
Н.Н. Портнягин, Г.А. Пюкке, Т.И. Горева ПОСТРОЕНИЕ МОДЕЛЕЙ ДЕГРАДАЦИИ СИСТЕМ НА ОСНОВЕ БАЙЕ-СОВСКОГО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СОСТАВЛЯЮЩИХ КОМПОНЕНТ // Научный электронный архив.
URL: http://econf.rae.ru/article/5626 (дата обращения: 27.07.2026).
 Построение графа состояний включает перечисление всех возможных сочетаний отказов Si; i = 0, (2m– 1) составляющих структурных единиц (СЕ), установление всех разрешенных переходов и вычисления вероятностей этих переходов. При анализе цепей достаточно высокой размерности процедуру формирования графа состояний необходимо формализовать.
Построение графа состояний включает перечисление всех возможных сочетаний отказов Si; i = 0, (2m– 1) составляющих структурных единиц (СЕ), установление всех разрешенных переходов и вычисления вероятностей этих переходов. При анализе цепей достаточно высокой размерности процедуру формирования графа состояний необходимо формализовать.  ормируется на основе стандартной программы комбинаторного преобразования всех возможных сочетаний индексов 1, 2,…..,m из mэлементов по i, гдеi = 1, m, кодирующих неработоспособные состояния системы.
ормируется на основе стандартной программы комбинаторного преобразования всех возможных сочетаний индексов 1, 2,…..,m из mэлементов по i, гдеi = 1, m, кодирующих неработоспособные состояния системы. 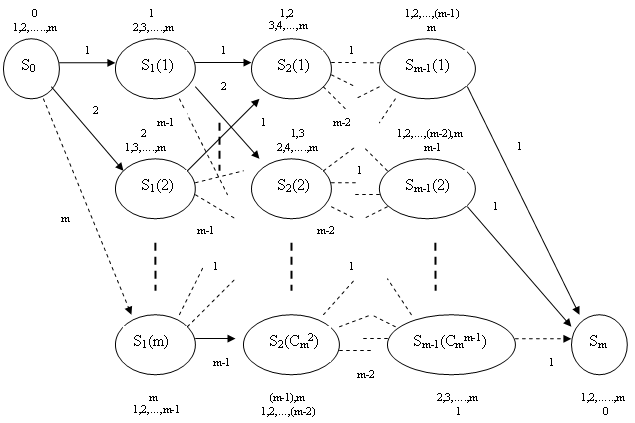




 | Рапостер i(k ∆t; λ) – Pаприор i(k ∆t; λ) | min.
| Рапостер i(k ∆t; λ) – Pаприор i(k ∆t; λ) | min.