Вибрационные и виброударные процессы в машинных конструкциях, собранных из решетчатых составляющих
Аннотация. Рассмотрены механические конструкции, моделируемые при помощи систем с большим числом степеней свободы и сконструированные посредством решеток, узлы которых могут быть связаны между собой. Проводится аналитическое построение вибрационных полей, устанавливающихся в таких конструкциях под действием внешних силовых факторов в предположении линейности систем. Кроме того, изучен случай присутствия в системе ударной пары, вызывающей в конструкции виброударные режимы движения. В этом случае анализ, получившейся сильно нелинейной системы, проводится при помощи методов частотно-временных анализа виброударных процессов.
Ключевые слова: вибрационные и виброударные процессы в системах со многими степенями свободы, зазор, операторы динамической податливости, периодические функции Грина, интегральные представления виброполей, частотно-временной анализ виброударных процессов, определяющие параметры виброударных режимов движения, решетки, стопки струнных решеток.
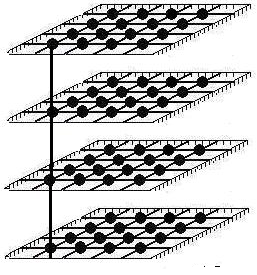
1.В работе [1], посвященной изучению многомерных виброударных систем при широкополосном случайном возбуждении колебаний, рассматривались, в частности семейства конструкций – 2D объектов, названных «стопками». Стопки представляют систему A>0 решеток, элементы которых расположены «одна под другой». Пример стопки дан на рис.1. С зазорами Δ()к расположено семейство решетчатых конструкций, состоящее, как указывалось, из А решеток (рис.2); =1,2……A, причем будем нумеровать решетки снизу вверх, то есть нижней решетке присвоим номер =1, а верхней решетке - =A.
Рис.1Рис.2
Решетчатые конструкции, предполагаются идентичными, составленными из двух взаимно перпендикулярных семейств упругих одинаковых линейных струн, защемленных на концах и имеющих соответственно длины L1 и L2 (рис.2). Отметим, что и здесь, и ниже, в силу идентичности решеток, там, где это не вызывает недоразумений, будем опускать индекс, нумерующий конкретную решетку.
Рассмотрим произвольную конструкцию, входящую в стопку [2, 3]. Каждая струна нумеруется при помощи индексов k =0,1,2,., N1и q = 0,1,2.. N2. В вершинах решетки помещены узлы - точечные абсолютно твердые тела с одинаковыми массами m.
Предполагается, что прямоугольные ячейки решетки одинаковы, но длины и ширины их сторон, вообще говоря, не равны между собой и сама решетка (дискретный аналог мембраны) - анизотропная. Струнные элементы предполагаются безынерционными. Крепления струн в узлах считаются абсолютно жесткими, а их натяжения - настолько большими, что возможными изменениями при линейных колебаниях можно пренебречь.
Пусть каждая «горизонтальная сторона» ячеек имеет длину ΔL1; «вертикальная» - ΔL2. Кроме того, пусть безынерционные «горизонтальные участки» имеют натяжение T1 , а «вертикальные участки» - соответственно T2.
Таким образом, динамика решетчатой конструкции может быть описана посредством функций смещения узлов решетки u()kq(t), где индексы k=0,1,2,.. N1;q=0,1,2,.. N2. При этом каждая из функцийu()kq(t) изменяется вдоль некоторой оси, перпендикулярной плоскости статического равновесия решетки. Будем считать, что первый по счету индекс (в данном случае k – нумерует струну, расположенную «слева направо» или наоборот - рис.2), а второй индекс (в данном случае q – «снизу вверх» или наоборот, рис 2).
Пусть силы диссипации, вынуждающие силы, а также любые другие неконсервативные силы, действующие в решетке на каждое из массивных точечных тел – малы. Обозначив их gkq(t, ukq,utkq,…), где многоточие означает прочие неучитываемые сейчас переменные, - малый параметр, модель системы построим следующим образом. Так как каждая частица лежит одновременно на двух струнах, то для всех значений индексов имеем для каждого N уравнений вида:
Здесь соответственно принято: индексация по независимой переменной – суть дифференцирование по ней; с1,2 = T1,2L1,2– коэффициенты упругости; верхний индекс нумерует решетчатые конструкции, образующие стопку. Граничные условия защемления можно записать как (ср. [2-5]) ukq=0, при k=0;N1;q=0;N2. Поэтому N= (N1 –1)(N2–1).
При необходимости сюда могут быть добавлены начальные условия. Однако далее рассматриваются установившиеся режимы движения. Поэтому вид начальных условий - несущественен.
В некотором смысле стопки являются аналогами системы шариков, установленных с зазорами [6]. При определенных условиях элементы стопки могут взаимодействовать друг с другом посредством, например, соударений узлов, в результате чего генерируются виброударные процессы весьма сложного вида.
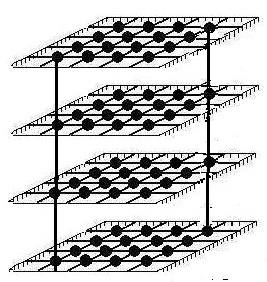
2. Решетки, образующие стопки могут быть связаны. На рис. 3 и 4 даны два примера, в которых решетчатые конструкции связаны различными упругими элементами. Рассмотрим для примера систему типа рис. 4 (с несколькими «прошивками»).
Рис.3 Рис.4
При этом будем вначале предполагать, что линейные связи между элементами стопок непременно проходят через узлы решеток. Структуры этих связей могут быть различны и определяться семействами, вообще говоря, упруго-диссипативных операторов связи S()kq,nj(p), где как обычно, pddt. Предположим, для простоты, что к каждому узлу приложена только одна дополнительная связь. Из дальнейшего будет видно, что это предположение существенно только для упрощения вида расчетных формул.
Не переходя к записи дифференциальных уравнений движения, приведем операторные уравнения движения, следующие из уравнений (1). В соответствии с общими методиками [7, 8] построим сперва матричные операторы динамической податливости для всех =1,2,…А: (p)=||Lkq,nj(p)||.
Отметим, что пятииндексная нумерация компонент матрицы операторов динамической податливости Lkq,nj (p) вызвана тем обстоятельством, что каждый узел нумеруется парой индексов и еще один индекс нумерует решетку.
Выражение Lkq,nj(p) обозначает проходной оператор динамической податливости [7], ставящей в соответствие силе, приложенной в узле (n, j) перемещение узла (k, q) (для й решетки ). И, соответственно, при n=k, j=q – имеем локальные операторы динамической податливости [7], отвечающие перемещению узла, вследствие силы, приложенной в нем самом. Для рассматриваемой системы принцип взаимности записывается как Lkq,nj (p) = Lnj,kq(p).
Система уравнений движения (1) при этом может быть записана в операторном матричном виде:
-1(p)||ukq||= ||gkq||. (2)
Здесь обозначено:-1(p) – матрица, обратная к (p) (матрица динамических жесткостей [7, 8]); ||gkq|| - матрица внешних сил, действующих в узлах -й решетки.
Отметим, что при таком выборе модели, даже линейные силы демпфирования относятся к внешним воздействиям. При выборе обычных линейных моделей диссипации, силы демпфирования могут быть учтены в самой структуре оператора (p) [7, 8] (см. п.4).
Для того, чтобы выписать операторные уравнения движения в «прошитой» системе, осталось добавить связи между решетками, образующими стопки. Имеем:
Здесь первый член в правой части – суть движение системы под действием малых сил, определяющих матрицу ||gkq||. Выведенное соотношение оказывается определяющим для рассматриваемых систем. Суммирование по показывает , что решетчатая конструкция с номером непосредственносвязана с конструкцией, носящей номер . Вообще говоря возможен вариант при котором такая связь осуществляется не непосредственно.
Так как рассматриваемая здесь система — линейна, то в соответствии с общими методами [7, 8] необходимые матричные операторы динамической податливости строятся всегда; при этом они будут определяться соответствующими индексами. Таким образом, для всех =1,2,…А получим систему матричных выражений вида:
при этом символ обозначает оператор динамической податливости объединенной системы («прошитых» решетчатых конструкций).
3..Операторы динамической податливости полностью определяются линейными частями систем и могут быть определены экспериментально [9]. При этом в случае, когда диссипация энергии, описывается посредством каких-либо «линейных гипотез», соответствующие члены могут быть внесены в представления для операторов [7-9].
В этом случае аналитическое представление операторов динамической податливости усложняются. Существуют, впрочем гипотезы трения, при принятии которых аналитические представления не меняют формы [10].
Рассмотрим описание периодических режимов движения рассматриваемых конструкций. Пусть вначале в уравнении движения типа (1) правые части зависят только от времени, то есть анализируемая система – гамильтонова: gkq(t, ukq, utkq,…)gkq(t). И пусть, кроме того, эти правые части периодичны по времени с периодом Т: gkq(t+Т)= =gkq(t)при всех k и q.
По сути это предположение обозначает Т-периодичность матриц ||gkq(t)|| и если уравнение движения записать в операторном виде ||ukq(t)||=(p)||gkq(t)||, то задача сведется к записи результата действия оператора (p) на периодическую вынуждающую силу.
Подобная задача в общем случае хорошо изучена [2, 3-5, 7, 8] и необходимо адаптировать теорию к случаю модели прошитой стопки решетчатых конструкций. Отыскивая Т-периодические режимы движения, целесообразно воспользоваться методами интегральных представлений периодических решений [2, 3-5, 7, 8, ], в соответствии, с чем искомый Т - периодический вибрационный процесс представим в виде
||ukq(t)||=||χkq,nj(t-s)||||gkq(s)||ds, (5),
где матрица X(t-s) ||χkq,nj(t-s)|| называется матрицей Т - периодических функций Грина (ПФГ) [7, 8] и каждая ее компонента (проходная или локальная ПФГ) определяется соответствующим оператором динамической податливости. Так пусть kq,nj(p) – компонента матричного оператора (p)
χkq,nj(t) =T-1kq,nj(iK)exp(iKt), (6)
причем, как обычно, T=2π-1.
Физический смысл матрицы ПФГ X(t)– реакция линейной системы на силовые воздействия, описываемые как Т–периодические последовательности δ-функций Дирака, обычно обозначаемые как δT(t). По определению
δT(t)=δ(t-Kt). (7)
Эту обобщенную периодическую функцию можно разложить в сходящийся в обобщенном смысле ряд Фурье вида [7,8]:
δT(t)= T-1exp(iKt). (8)
Физический смысл обобщенной функции δT(t) – суть периодические последовательности мгновенных ударов с единичными импульсами, которые повторяются через времена, кратные времени t=T.
Таким образом, каждая компонента матрицы X(t-s) ||χkq,nj(t-s)|| - суть отклик узла -й решетки (k,q) на периодическую последовательность ударов с заданными стандартными параметрами, наносимых в узле (n, j) при условии, что все другие узлы свободны от внешних воздействий. Такой подход часто применяется как основа для определения ПФГ [7-9].
Пользуясь (5) и (6), имеем совокупность периодических режимов движения, устанавливающихся в результате поля внешних сил { gkq(t)}.
4. Пусть вынуждающие Т - периодические силы обладают свойством симметрии, то есть для всех k и q: gkq (t+Т/2)= gkq(t). Тогда, очевидно, свойством симметрии будут обладать также и перемещения узлов решетки. Для отыскания симметричных Т – периодических режимов движения в соответствии с разработанными [7-9] алгоритмами частотно-временных методов (методов периодических функций Грина) используются симметричные ПФГ
kq,nj(t)=kq,nj[i(2]exp[i(2t], (9)
При этом вместо определяющего интегрального представления (10) будем иметь [7-9]:
||ukq(t)||=||kq,nj(t-s)||||gkq(s)||ds. (10)
Здесь введена симметричная периодическая последовательность -функций Дирака [2-4]:
T/2(t)=[(t-Kt)-(t-T/2-Kt)], (11)
которая раскладывается в обобщенный ряд Фурье по нечетным гармоникам:
T/2(t)=exp[i(2t]. (12)
Физический смысл обобщенной функции T/2(t) – суть Т-периодические последовательности мгновенных ударов с единичными импульсами, которые через каждую половину периода изменяют свое направление на противоположенное по отношению к первоначальному. Каждая компонента матрицы (t-s)||kq,nj(t-s)|| - отклик (перемещение) узла -й решетки (k,q) на симметричную Т-периодическую последовательность ударов, наносимых в узле (n, j), при условии, что все другие узлы свободны от действия каких – либо внешних воздействий.
5. Получены необходимые соотношения, позволяющие в линейном случае анализировать вибрационные поля решетки, а для нелинейного случая получить иногда удобные исходные представления. Рассмотрим пример решения линейной задачи.
Пусть дано некоторое семейство узлов прошитой конструкции (для их выделения будем использовать в качестве индексов прописные буквы - {(K,Q)}).
В качестве первого примера рассмотрим колебания произвольной прошитой конструкции. Будем предполагать, что к каждому узлу из указанного семейства, приложена сила из семейства {AKQcos(t+KQ)}. При этом прочие узлы – свободны от внешних силовых воздействий
Учитывая линейность системы и основные свойства операторов динамической податливости, получаем для компонент матрицы смещения узлов решетки:
||ukq(t)||=||Lkq,KQ(p)AKQcos(t+KQ)||, (13)
где суммирование ведется только по узлам семейства {(K,Q)}.Оператор динамической податливости дается при помощи решения соответствующей линейной задачи [7, 8] или определяется экспериментально [9] (с учетом сделанной оговорки об учете демпфирования). Тогда
Методики вычисления модулей и аргументов для операторов сложной структуры типа, например, (p) – стандартны [7 - 9].
В качестве второго примера рассмотрим случай, когда по узлам, входящим в семейство {(K,Q)}периодически наносятся удары, описываемые при помощи обобщенных функций {BKQ(t - KQ)}, где BKQи KQ –заданные параметры ударов (их импульсы и фазы), а =2/ - период их нанесения. Воспользовавшись интегральным представлением (5), найдем:
||ukq(t)||=||kq,KQ(t-s)|| ||gKQ(s)||ds. (15)
Принимая во внимание свойства периодических последовательностей -функций [7, 8] и определение матрицы ПФГ ||kq,KQ (t-s)|| (п.5), из представления (15) выводим:
||ukq(t)||=||BKQkq,KQ(t-KQ)||, (16)
что и определяют искомое решение. В данном случае это решение – суть матрица, компоненты который некоторые линейные комбинации ПФГ.
Отметим также, что системы рассматриваемого типа обладают определенными фильтрующими свойствами [7, 8]. Изучение свойств таких фильтров представляет собой самостоятельную актуальную проблему.
6. В работах [3, 7 - 9, 11] показано, что для нахождения законов движения различных виброударных систем содержащих, вообще говоря, произвольное число традиционных или нетрадиционных ударных элементов, а также сохраняющих линейность между соударениями основным условием получения решений оказывается возможность эффективного нахождения операторов динамической податливости соударяющихся линейных подсистем.
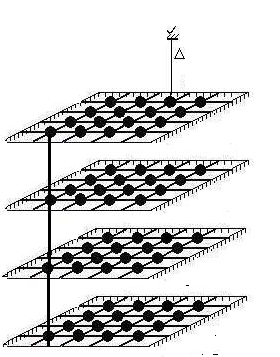
Поэтому, если вблизи вибрирующей линейной (в данном случае
Рис.5
прошитой стопки) системы установить ограничитель, то закон движения любой точки системы определяется достаточно просто. Рассмотрим, например систему, показанную на рис. 5. Здесь ударную пару образуют неподвижный ограничитель (отмечен галочкой), установленный с зазором Δ и некоторый узел верхней решетки. Обозначим его координату ukq(t).
Пусть операторное уравнение движения, приведенное к ударной паре (r,q) имеет вид [11]:
u1rq= L1rq(p){U1rq(t)+Ф1[u1rq(t),1rq(t)]}. (17)
Здесь: u1rq– прогиб соударяющегося узла;L1rq(p) – оператор динамической податливости, приводящий все силы, действующие в системе к соударяющемуся узлу ([7-9, 11]); U1rq(t)-приведенная Т-периодическая возбуждающая сила; Ф1[u1rq(t),1rq(t)] – сила ударного взаимодействия. Будем полагать, что удары происходят вдоль какой-либо оси и удары предполагаются прямыми и центральными, отвечающими, гипотезе Ньютона. Таким образом, если, например, удар происходит при t=t0, то в соответствии с [7, 8] можно записать:
где обозначено: D³0- величина установочного зазора; величина Jrq - значение ударного импульса во время 0-го удара, произошедшего в момент времени t0; величины Rrqи mrq- значения коэффициента восстановления и массы соударяющегося узла.
Методы частотно-временного анализа [7-9, 11] для Т- периодических виброударных процессов с одним ударом за период движения приводит к известному двухпараметрическому представлению для искомой относительной координаты
urq(t)=urq0(t)-Jrq1rq(t-r), (19),
где ur0(t)– решение задачи в пренебрежении ударами (решение линейной задачи); Jrи r - искомые параметры - импульс и фаза удара. ПФГ r(t)- реакция линейной системы на силовое воздействие, описываемое T- периодической последовательностью d-функций Дирака dT(t) (7).
Возвращаясь к двухпараметрическому представлению (4), заметим, что для искомой относительной координаты и параметров движения должны действовать условия:
ur(t)≤Dr;t[0,T]; J=2mr (1+R)|r(φr-0)|≥0; ur (φ)=Dr(20)
Третье и четвертое соотношения здесь дают два уравнения для определения импульса и фазы удара. Их решения даны, например, в [7, 8]. Подобные задачи будут рассмотрены в дальнейшем в ином аспекте.
Изложенное представляет хорошо изученную собой реализацию методов частотно-временного анализа для систем с одной ударной парой. Подчеркнем, что приведенные соотношения – нетривиальны, так как здесь весьма нетривиальна структура соударяющейся системы. В ряде случаев проведение расчетов другими методами – проблематично.
Первое условие (20), вообще говоря, проверяется только численно. Однако для случаев нелинейного резонанса, они, как правило, выполняются [7, 8]. Решение (19) должно еще анализироваться на устойчивость. При выполнении инженерных расчетов удобно пользоваться так называемым энергетическим условием неустойчивости, позволяющим выделить заведомо неустойчивые режимы [7-9].
Отметим, наконец, что задачи динами прошитых стопок имеют многочисленные и интересные приложения. Получаемые аналитические выражения могут быть существенно конкретизированы в случае, когда имеет смысл отказаться от принятой здесь большой общности и в модели будут введены более подробные описания связей между решетчатыми конструкциями – элементами стопок. Вычисления становятся громоздкими, и их проведение требует отдельного рассмотрения.
Работа выполнена при поддержке РФФИ (проект 10-08-00500-а).
Список литературы
Крупенин В.Л Об исследованиях одномерных и многомерных виброударных процессов при случайном широкополосном возбуждении// Проблемы машиностроения и надежности машин, №10, 2010. –С.25-31
В.Л. Крупенин. К описанию виброударных процессов в решетчатых двумерных системах// Интернет-журнал «ВНТР», №1 (5), 2008 г.-C.22-31
Крупенин В.Л. Случайные соударения решетчатой конструкции с периодической структурой и плоским ограничителем хода // Проблемы машиностроения и надежности машин. – 2005. -№4. С. 105-109.
Нагаев Р.Ф., Ходжаев К.Ш. Колебания механических систем с периодической структурой. - Ташкент: ФАН, 1973. – 272 с.
Кобринский А.Е., Кобринский А.А. Виброударные системы. - М.:Наука. 1973. -591 с.
Бабицкий В.И., Крупенин В.Л. Колебания в сильно нелинейных системах.-М., Наука, 1985. – 384 с.
Babitsky V.I.,. Krupenin V.L Vibration of Strongly Nonlinear Discontinuous Systems.- Berlin. Heidelberg, New York: Springer-Verlag, 2001. –404 p.p.
Широкополосные виброударные генераторы механических колебаний//Крупенин В.Л.,Веприк А.М. и др.- Л.: Машиностроение, 1987. 76 с.
В.Л. Крупенин. О моделировании виброударных процессов в двумерных решетках с релаксацией// Интернет-журнал «ВНТР», №5 (35), 2012 г.-C.26-35
Асташев В.К., Крупенин В.Л. Волны в распределенных и дискретных виброударных системах и сильно нелинейных средах // Проблемы машиностроения и надежности машин. – 1998. - № 5 - С. 13-30.
Библиографическая ссылка
Крупенин В.Л. Вибрационные и виброударные процессы в машинных конструкциях, собранных из решетчатых составляющих // Научный электронный архив.
URL: http://econf.rae.ru/article/6943 (дата обращения: 08.07.2026).
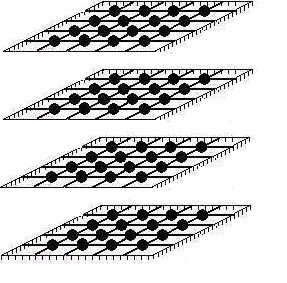
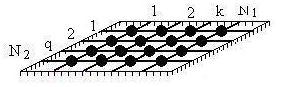 Рис.2
Рис.2