Федеральное государственное бюджетное учреждение науки институт машиноведения им. А.А. Благонравова Российской академии наук
krupeninster@gmail.com
Аннотация. Рассмотрены методы, позволяющие прогнозировать поведение вибрационных и виброударных режимов в механических конструкциях с большим числом степеней свободы при отказе от моделей в виде дифференциальных уравнений движения. Методы анализа могут основываться не только на анализе дифференциальных уравнений движения, но и на использовании экспериментально получаемых характеристиках процессов. Таких, например, как динамические податливости и жесткости и др. В ряде случаев бывает удобнее сразу оперировать с этими характеристиками, не обращаясь к дифференциальным уравнениям. Такой подход оказывается актуальным, когда цель анализа — исследование именно конструкций, а не их моделей. Ниже приводятся примеры построения упомянутых характеристик в результате типовых экспериментов. Проводится построения вибрационных полей таких конструкций, как в линейном, так и в виброударном случаях, когда анализ производится при помощи частотно-временных методов.
Ключевые слова: вибрационные процессы, виброударные процессы, системы со многими
функции Грина, частотно-временной анализ, виброударных процессов, определяющие параметры виброударных режимов движения, экспериментальные методы построения моделей систем.
1. В работах [1-4] и др. отмечалось, что методы анализа динамики вибрационных и, в частности, виброударных процессов, могут основываться не только на анализе дифференциальных уравнениях движения, но и на использовании экспериментально получаемых характеристиках процессов.
Таких, например, как динамические податливости и жесткости, функции Грина, периодические функции Грина и др. Эти характеристики непременно могут быть построены в случаях, когда заданы уравнения движения систем. В этом случае знание одной из таких характеристик обеспечивает знание и всех остальных. Но в ряде случаев бывает удобнее сразу оперировать с этими характеристиками, не обращаясь к дифференциальным уравнениям. Такой подход оказывается актуальным, когда цель анализа — исследование конструкций, а не их моделей. Здесь естественно нельзя не сделать оговорку, что необходима уверенность, что объект исследования - линеен. Линейность объекта может быть проверена теми же экспериментальными методами, например, посредством проверки выполнения принципа взаимности. Ниже приводятся примеры построения упомянутых характеристик в результате типовых экспериментов.
Необходимые определения даны в работах [1-3]. Обычно характеристики систем строятся как результат отклика конструкций на определенного вида эталонные воздействия.
Основной характеристикой оказывается динамическая податливость – вообще говоря, комплекснозначная функция чисто мнимого аргумента i. Обозначение: L(i). Функция L (особенно при экспериментальном определении) задается своим модулем и аргументом:
L(i)=| L(i)|arg[-i argL(i)].
Рассмотрим схемы определения динамических податливостей при двух различных эталонных воздействующих факторах.
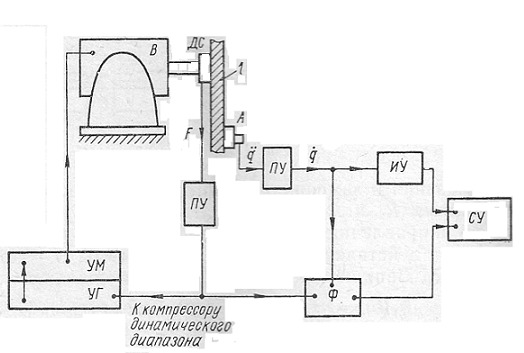
2. Пусть тестовый сигнал — синусоидальный с медленно меняющейся частотой. Подробное описание возможных возбуждения и измерения приведено в [5, 6]. Для возбуждения силового (моментного) синусоидального воздействия в широкой полосе частот наиболее приемлемым является электродинамический вибратор, который возбуждается при помощи управляющего генератора через усилитель мощности. Измерение силы возбуждения производится при помощи: датчика силы пьезокерамического типа, помещаемого между толкателем вибратора и исследуемой конструкцией.
Рис.1
В интересующей нас точке конструкции устанавливается пьезоакселерометр, электрический сигнал которого после предварительного усиления и интегрирования поступает на измерительный усилитель и фазометр. Электрический сигнал датчика после предварительного усиления также поступает на фазометр и далее — на вход блока компрессора динамического диапазона управляющего генератора. Тем самым обеспечивается постоянство силы возбуждения при автоматической развертке частоты. Электрические сигналы от измерительного усилителя и фазометра подаются на входы двухканального самописца уровня, изображающего в определенном масштабе зависимость модуля и аргумента динамической податливости от частоты. Ставшая классической блок- схема измерителя динамической податливости фирмы «Брюль и Къер» изображена на рис.1, на котором обозначено: УГ— управляющий генератор; УМ— усилитель мощности; В — электродинамический вибратор с вибростолом; ДС — датчик силы; А - акселерометр; ПУ — предварительный усилитель; ИУ— измерительный усилитель; Ф -фазометр; СУ — самописец уровня; 1 — исследуемая конструкция; — сигналы скорости и ускорения;F — сигнал динамической силы.
К основным недостаткам способа относятся искажение частотных характеристик исследуемой конструкции вследствие присоединения колебательной системы вибратора и большое время проведения эксперимента (десятки минут).
3. Обратимся теперь к силовому ударному воздействию, которое часто принимается в качестве эталонного. Известно [1, 2], что мгновенное ударное воздействие с единичным импульсом и действующее, например, при t=0 описывается при помощи обобщенной δ-функции Дирака [1-3].
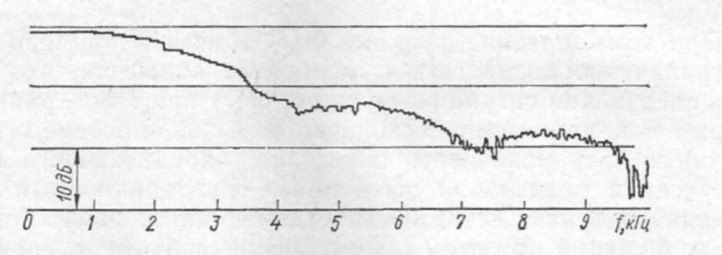
Это согласуется с экспериментами [3]. Установлено, в частности, что при соударении твердых тел спектр ударной силы (рис. 2) достаточно широк и равномерная его аппроксимация приводит к удовлетворительным результатам, которые тем точнее, чем ярче выражены фильтрующие свойства соударяющихся колебательных систем. На рис. 2 видна зона равномерного спектра 0—2 кГц при времени соударения — t0=2-10-4 с. На основании вышесказанного в качестве эталонного удобно выбирать ударное воздействие, что позволяет получать удобные математические описания характеристик линейных систем.
Рис. 2
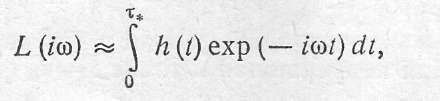
Реакция колебательной системы на однократное силовое воздействие, представляемое в виде δ-функции Дирака, обозначаетсяh(t) и носит название функции Грина. Между функцией Грина и динамической податливостью существует зависимость
определяемая свойствами Фурье-анализа динамических процессов [1-3].
Ввиду диссипации энергии limh(t)= 0 при t→ поэтому на практике бесконечный предел в интеграле можно заменить конечным
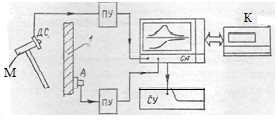
Таким образом, если записать отклик механической системы на одиночный удар, а затем произвести его Фурье-преобразование, то мы могли бы получить интересующую нас динамичекую податливость. На основе этого принципа и работает система (рис. 3), состоящая из динамометрического молоткаДМи двухканального спектроанализатора СА, являю цегося, по существу, специализированным компьютером.
В динамометрический молоток встроен пьезокерамический датчик силы, которым и производится удар. Меняя насадки, можно добиться необходимых формы и спектра ударного импульса. Сигналы датчика силы и акселерометра, установленного на исследуемом объекте, через предварительные усилители подаются на каналы анализатора.
Рис.3
В анализаторе, происходит их временная дискретизация и обработка подаваемых на его каналы сигналы по специальным программам. Обработка занимает доли секунды. Информация отображается на дисплее, может быть передана в память компьютора или на самописец уровня СУ.
Преимущество метода в том, что конструкция исследуется в «чистом виде» (без присоединения «чужеродных» колебательных систем); имеется возможность получения экспресс-информации.
Таким образом, показано, как минуя переход к аналитическим моделям конструкций можно построить их динамические податливости.
Подчеркнем, что эти динамические податливости могут быть разных родов – локальные (1) и проходные (2). То есть реакции систем в выделенных точкакх на силы, приложенные в тех же точках (1) или на силы приложенные в удаленных точках тех же конструкций (2).
4. Обратимся теперь к виброударным системам. Показано [1-3], что для анализа периодических режимов движения в таких системах особую роль играют так называемые периодические функции Грина – реакции систем на периодические последовательности δ-функций Дирака (обозначение: tнекоторый период). Периодическая последовательность tтак:
t (1)
При этом последний ряд Фурье сходится в обобщенном смысле [1, 2]. Периодические функции Грина (ПФГ) обозначаются как χ(t) и могут быть определены как:
χ(t)= .
Таким образом, ПФГ линейных систем определяются их динамическими податливостями или функциями Грина.
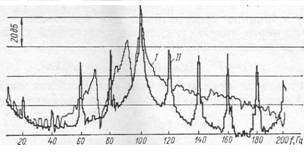
Для примера на рис. 4 приведен спектр модуля динамической податливости судового рамного фундамента (I) и и спектр его реакции (II) на силовое возбуждение (1) в полосе частот 0-200 Гц. Частота следования ударов 20 Гц.
Рис.4
Таким образом, возникает простая идея: попыться «сконструировать» искомый периодический или почти периодический виброударный режим [4] из ПФГ – реакций соударяющихся линейных систем на периодические последовательности ударов.
Методы анализа виброударных систем, в которых важную роль играют ПФГ, получили название «методы частотно-временного» анализа. Не предполагая здесь останавливаться на теории, сконцентрируемся на экспериментальных вопросах, связанных с частотно-временным анализом. При этом будем интересоваться, в основном, весьма важными резонансными виброударными процессами [1, 2].
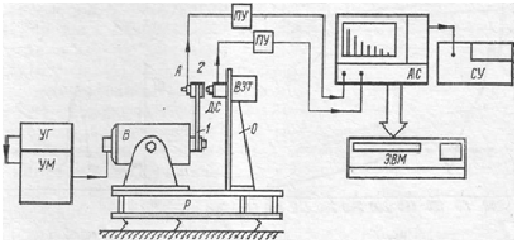
В качестве примера исследуем типовую виброударную систему— балочку с сосредоточенным на свободном конце массивным телом, снабженную жестким односторонним ограничителем хода. Такая система весьма распространена в технике и моделирует, например, контакты релейных устройств, исполнительные устройства клапанов, модули генератора широкополосной вибрации для вибрационных испытаний и т. д. Для проведения эксперимента был разработан стенд, схема которого приведена на рис. 5.
Здесь использованы устройства: УМ— усилитель мощности (СУВ-1); В — электродинамический вибратор (ВЭДС-10); ДС — датчик силы (ДК-1); ЭВМ — компьютер;
Рис.5
УГ —управляющий генератор; А — акселерометр; ПУ — предусилитель; АС — узкополосный цифровой анализатор; СУ — самописец уровня. На рисунке также показаны: Р — несущая рама; О — опора; ВЗТ — виброзадерживающее тело; 1 — балочка; 2— массивное тело.
Синусоидальный сигнал управляющего генератора проходит через усилитель мощности и подается на обмотку возбуждения вибратора, жестко установленного на несущей раме. На штоке вибратора закреплена балочка (200ˣ 50ˣ 1 мм), выполненная из пружинной стали 65Г. На массивном теле (массой 130 г), присоединенном к балочке, крепится акселерометр, а на несущей раме, кроме того, смонтирована опора с датчиком силы, свободная шпилька которого является ограничителем перемещений. Для уменьшения динамической податливости опоры, в районе установки датчика силы крепится виброзадерживающее тело массой 1 кг. В целях уменьшения ударного демпфирования соударяющиеся поверхности изготовлены из стали Ст.45 и термобработаны до 56—61 HRCэ. Кроме того, для реализации точечного контакта поверхности ударной пары имеют форму плоскость — полусфера. Электрические сигналы датчика силы и акселерометра после предусилителей поступают для обработки в узкополосный цифровой анализатор спектра. Анализатор работает как в частотной, так и во временной областях; к нему подключены самописец уровня и компьютер.
Описанный стенд позволяет с одного установа определять как динамические податливости, так и импульсы ударных сил, что очень важно для повышения точности и повторяемости экспериментальных данных.
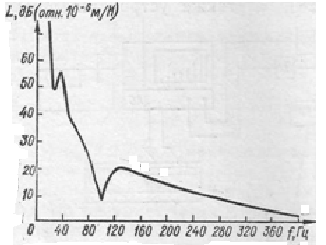
Спектр модуля локальной динамической податливости в точке контакта исследуемой колебательной системы в диапазоне частот 18—400 Гц, полученный с помощью регистрирующей аппаратуры, изображен на рис. 6.
Рис.6.
В соответствии с вышеизложенным величину ударного импульса (J) при малой диссипации можно определить по следующей формуле:
J= –Δχ(0) ≈ –Δ{2T-1L(ik)]}-1, (2)
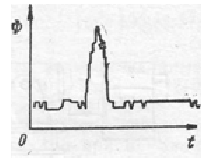
где суммирование ведется с учетом знака величины Re[L(ik)].Выражение (2) является приближенным и справедливо для систем, у которых мнимая часть динамической податливости мала по сравнению с действительной. Так как коэффициенты ряда в формуле (2) убывают достаточно быстро, то при суммировании целесообразно ограничиться сравнительно небольшим их числом. Так, начиная с 20 члена, относительный вклад каждого последующего в общую сумму не превосходит 0,1 %. Именно таким числом членов мы и пользовались при вычислениях. Для проверки найденного по формуле (2) ударного импульса (при различных значениях зазора) применяется непосредственный способ — измерение, основанный на численном интегрировании измеренной при помощи датчика силы силовой функции (рис. 7) по формуле прямоугольников
Рис.7
J=CgΔτФj,
где Cg– масштаб шкалы силы, Н/дел; Δτ – величина интервала дискретизации, Δτ=2.10-5 с; Фj — дискретные средние значения силовой функции в j-м интервале дискретизации, дел.; n-количество интервалов дискретизации.
Как следует из общей теории виброударных систем [1, 2], резонансные виброударные режимы существуют в полосах частот Ώj— Ώ*j; Ώj - собственная частота линейной системы (в нашем случае Ώj = 17,6 Гц); Ώ*j — частота срыва резонансных колебаний, определяемая как величинами демпфирования и внешней силы, так и собственными динамическими свойствами системы. В рассматриваемой колебательной системе устойчивые резонансные режимынаблюдались в полосе частот 18—28 Гц. Этот диапазон исследован с шагом 2 Гц для трех значений зазора: Δ1 = 2,0ˣ10-4м, Δ2 = 3,7ˣ10-4 м, Δ3 = 5,8ˣ10-4 м при минимальном
напряжении на обмотке возбуждения вибратора, достаточного для поддержания резонансного виброударного режима. Жесткое возбуждение резонансного виброударного режима осуществлялось внешним запускающим импульсом.
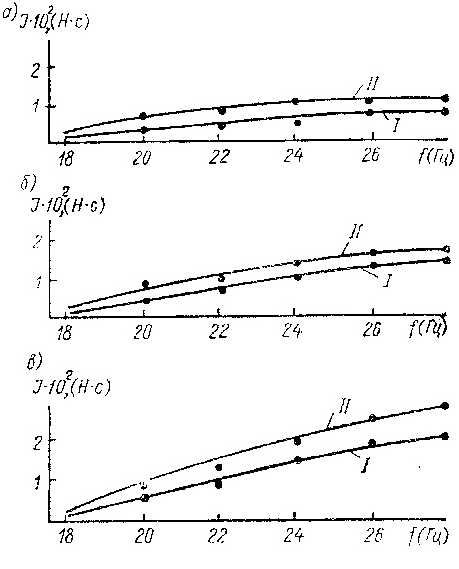
На рис. 8 приведены зависимости величин ударных импульсов от частоты, полученные вычислением (кривая I) и измерением (кривая II) для трех значений зазора (а — Δ1, б — Δ2, в — Δ3), показывающие их удовлетворительное совпадение.
Следует отметить.Что даже при проведении вибрационных измерений с пормощью современной прецизионной аппаратуры, точность оказывается в пределах 1 дБ. уЧитывая особенности приведенных расчетных формул, можно определенно констатировать, что без привлечения каких-либо специальных методик решение проблемы достижения большей точности измерения ударных импульсов – проблематично.
Рис.8
Вышеизложенное демонстрирует возможность предсказания с достаточной для инженерной практики степенью точности величин ударных импульсов в ударных парах на основе экспериментально полученной информации о динамических свойствах соударяющихся объектов. Значение величин ударных импульсов позволяет прогнозировать ресурс механизма в целом. Кроме того появляется возможность строить поля его виброперемещений, что важно для выбора мест размещения опорных и неопорных связей.
Рис.9
Рис.10
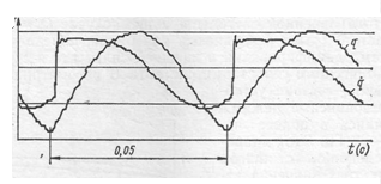
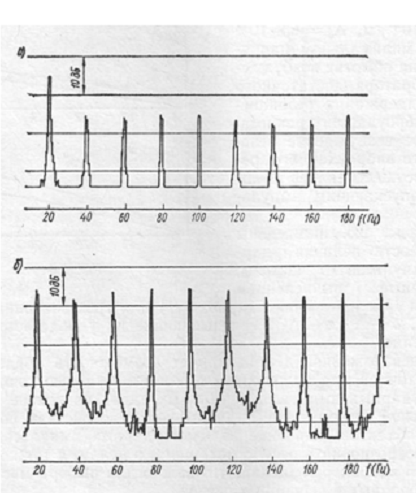
Эспериментально полученные законы движения описанной виброударной системы и их спектральные представления приведены на рис. 9 и 10. На рис. 9 изображены характерные зависимости скорости () и перемещения(q), а на рис. 10 —спектры ускорения сосредоточенного тела (а), ударной силы (б) в резонансном виброударном режиме частотой 20 Гц. Эти зависимости (получены с помощью регистрирующей аппаратуры) иллюстрирую сказанное о методах частотно-временного анализа и показывает, что имеется возможность дать описание сильно нелинейной задачи не обращаясь к традиционным моделям систем.
Работа выполнена при поддержки РФФИ (проект№ 10-08-00500-а).
Список литературы.
1.Бабицкий В.И., Крупенин В.Л. Колебания в сильно нелинейных системах.-М., Наука,
В.Л.,Веприк А.М. и др.- Л.: Машиностроение, 1987. 76 с.
4.БурдВ.Ш. Вынужденные почти периодические колебания ударного осциллятора - №4(56), 2012 г. - С.1-13.
Библиографическая ссылка
Крупенин В.Л.,Веприк А.М., Андрианов Н.А.,Семенова Е.Б., Саламандра К.Б. ОПРЕДЕЛЕНИЕ ВИБРОПОЛЕЙ МАШИННЫХ КОНСТРУКЦИЙ В РЕЗУЛЬТАТЕ ЭКСПЕРИМЕНТАЛЬНОЙ РЕАЛИЗАЦИИ ЧАСТОТНО-ВРЕМЕННОГО АНАЛИЗА // Научный электронный архив.
URL: http://econf.rae.ru/article/7009 (дата обращения: 28.07.2026).