К АНАЛИЗУ МАТЕМАТИЧЕСКОЙ МОДЕЛИ И СТРУКТУРНОЙ СХЕМЫ ЭЛЕКТРОМАГНИТНОЙ ТРЕХКООРДИНАТНОЙ СИСТЕМЫ ВОЗБУЖДЕНИЯ ВИБРАЦИЙ
В.Л. Крупенин1, А.Е. Божко2, К. Б.Мягкохлеб 2
1Федеральное государственное бюджетное учреждение науки Институт машиноведения им. А.А. Благонравова Российской академии наук, г. Москва (Россия)
2 Институт проблем машиностроения им. А.Н. Подгорного НАН Украины, г. Харьков (Украина)
1
Даны результаты изучения особенностей построения математической модели движения платформы трехкоординатного электромагнитного вибростенда (ЭМВС). На основе разработанной математической модели составлена структурная схема ЭМВС. Показаны пути компенсации угловых колебаний.
THE MATHEMATICAL MODEL AND A BLOCK DIAGRAM OF THE EXCITATION SYSTEM OF THREE-AXIS VIBRATION OF THE ELECTROMAGNETIC TYPE.
The features of construction of mathematical model of movement(traffic) of a platform of the three-coordinate electromagnetic vibrating stand (EMVS) are shown. On the basis of the developed mathematical model the block diagram EMVS is made. The ways of indemnification of angular fluctuations are shown.
Центральным звеном в комплексе мероприятий по повышению надежности и улучшению эксплуатационных параметров технических изделий, предназначенных для работы в условиях интенсивных динамических нагрузок, являются вибрационные испытания [1-3]. Работа по созданию систем электромагнитного возбуждения механических колебаний, для вибрационных испытаний, а также для различных технологических процессов является актуальной, поскольку направлена на экономию времени и материальных затрат в процессе создания новых машин, на повышение качества и надежности технологического оборудования. Так же многокоординатные вибростенды играют важную роль в современной испытательной технике при решении задач повышения достоверности получаемых оценок, поскольку формируемые на них вибрации наиболее полно соответствуют эксплуатационным нагрузкам.
Рассмотрим трехкоординатный ЭМВС, его схема приведена на рис. 1. принцип возбуждения колебаний платформы, связанной с тремя якорями определенным образом, основан на воздействии на якоря переменным магнитным полем, действующим одновременно по трем направлениям. ЭМВС состоит из платформы и трех электромагнитных вибровозбудителей (ЭМВ), расположенных по трем взаимно перпендикулярным плоскостям. В ЭМВ силы, возбуждающие колебания, создаются в результате воздействия переменного, во времени магнитного поля на ферромагнитные тела. Система состоит из сердечника электромагнита с обмоткой, якоря и упруго опертого тела, с которым жестко связан якорь. Когда по обмотке протекает электрический ток, возникает магнитное поле, силовые линии которого замыкаются. В магнитном поле на торцовые сечения сердечника и якоря действуют поверхностные нагрузки. Если ток переменный, то нагрузки изменяются во времени, возбуждая колебания якоря и скрепленного с ним тела, например платформы вибростенда или рабочего органа вибромашины.
Трехкоординатный ЭМВС является электромеханической системой, особенностью математического моделирования которой является наличие как механических элементов, так и электрических цепей, обеспечивающих создание движущих сил и моментов. Для описания таких систем исрользуем уравнения Лагранжа-Максвелла. При составлении уравнений движения предполагаем, что механическая часть определяется сосредоточенными параметрами, а электрическая квазистационарными токами. Это позволит описывать движение ЭМВ обыкновенными дифференциальными уравнениями. Уравнения динамики трехкоординатного ЭМВС, полученные на основании уравнений Лагранжа-Максвелла [1], имеют вид
где ; ; q – линейные обобщенные координаты;
m – масса платформы;
Сx, Сy, Cz – коэффициенты жесткости упругих элементов, установленных соответственно по координатам x, y, z;
x, y, z,,, – перемещения массы m;
bx, by, bz – коэффициенты диссипации;
Jx, Jy, Jz–моменты инерции платформы;
Ix, Iy, Iz – токи в катушках;
–величина воздушных зазоров;
, , площади воздушных зазоров по координатам X, Y, Z соответственно;
а – сторона сечения магнитопровода;
w –число витков;
R –активное сопротивление катушек;
,0 –магнитные проницаемости.
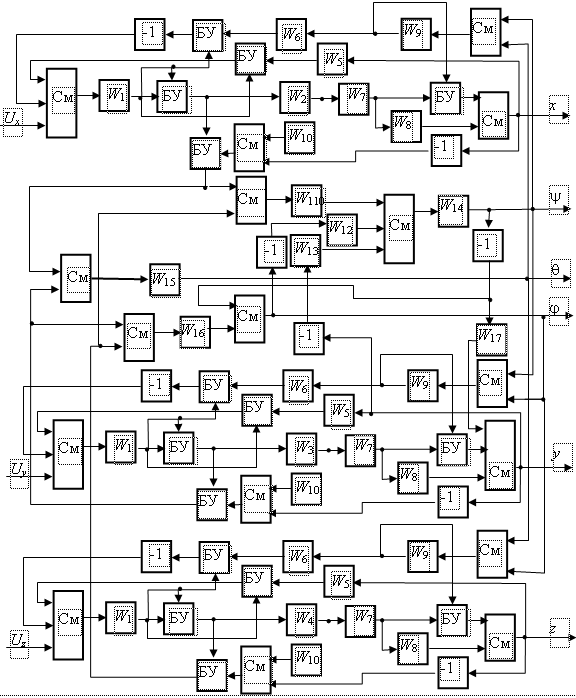
Далее необходимо проанализировать полученные уравнения, для этого построим структурные схемы и определим передаточные отношения. Структурная схема это, своего рода, наглядное представление отношений между входом и выходом каждого элемента нашей электромеханической системы, точнее электромагнитномеханической а именно ЭМВС, которые в свою очередь являются элементарными передаточными функциями. Каждый блок структурной схемы имеет свою передаточную функцию. Для составления структурной схемы ЭМВС воспользуемся операторным методом, нашедшим применение в теории автоматического управления, а точнее говоря, воспользуемся преобразованием Лапласа.
Уравнения динамики трехкоординатного ЭМВС о операторной форме выглядят следующим образом:
Уравнения движения ЭМВ даже при введении всевозможных упрощающих предположений остаются принципиально нелинейными, отметим что электромагнитный вибровозбудитель, независимо от того, воспроизводим мы вибрацию либо удар, является системой, состоящей из трех частей: механической, магнитной и электрической. Нелинейной является магнитная часть, а именно тяговое усилие пропорционально квадрату магнитного потока, мы сглаживаем эту нелинейность при помощи обратных связей в системе управления. Передаточную функцию ЭМВ можно условно определить как отношение выходной координаты (х(t) – для однокоординатного, в трехкоординатном добавляются перемещения по соответствующим координатам) к входной координате I(t) или U(t), то есть ток или напряжение (в зависимости от того какой источник используется генератор тока или напряжения). Учитывая направление прохождения сигнала через ЭМВС представим отношение выходного сигнала к входному как последовательность структурных элементарных звеньев.
См – сумматор;
БУ – блок умножения;
-1 – инвертор;
Структурная схема трехкоординатного ЭМВ представлена на рис.2. Данная структурная схема отражает преобразование входного сигнала в колебания платформы вибростенда. Как видно из структурной схемы, в системе имеются угловые колебания, которые не поддаются компенсации при принятой начальной конструкции трехкоординатного ЭМВС. Для компенсации угловых колебаний необходимо увеличение числа электромагнитных вибровозбудителей по каждой координате.
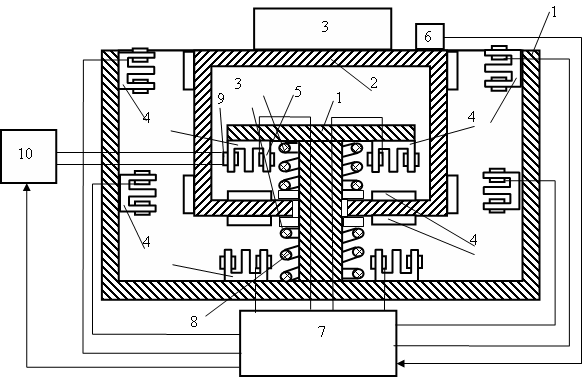
На основании данных математической модели и структурной схемы был разработан многокоординатный электромагнитный вибростенд, представленный на рис. 3, на него получен патент Украины на изобретение [4].
Рисунок 3 – Многокоординатный вибростенд
1 – основание; 2 – платформа; 3 – объект нагружения; 4 – вибровозбудители; 5 – обмотки возбуждения; 6 –блок вибропреобразователей; 7 – система управления; 8 – соединительные узлы; 9 – обмотки постоянного тока; 10 – регулируемый источник постоянного напряжения
Многокоординатный вибростенд работает следующим образом. Система управления 7 формирует управляющие сигналы, которые отвечают программе испытаний, и поступают на вибровозбудители 4, которые передают вибрационное воздействие на платформу 2, где расположены объект нагружения 3 и блок вибропреобразователей 6. В процессе испытаний блок вибропреобразователей 6 фиксирует механические колебания, которые испытывает объект нагружения 3, и превращает их в электрический сигнал. Исходный сигнал блока вибропреобразователей 6 поступает на вход управляющей системы 7, которая по этому сигналу корректирует необходимые значения сигналов управление любым вибровозбудителем 4. Кроме того, система управления 7 формирует сигналы управления регулируемым источником постоянного напряжения 10, за счет чего формируется необходимое постоянное напряжение на дополнительных обмотках 9 вертикально расположенных электромагнитов 4. Это дает возможность получить компенсирующую электромагнитную силу, линия действия которой противоположна силе гравитации, то есть исключить влияние весовых параметров объекта нагружения 3 и платформы 2.
Такое построение многокоординатного вибростенда разрешает существенным образом уменьшить влияние соединительных узлов на формирование воспроизводимых нагрузок, а также повысить надежность вибростенда.
Работа выполнена при поддержке Российского фонда фундаментальных исследований (проект № 13-08-90419 Укр_ф_а) и Государственного фонда фундаментальных исследований Украины (проект № Ф53.7/038).
Выводы
Зная математические модели ЭМВС и представляя себе структуры этих ЭМВС, можно более четко ориентироваться в существе преобразований задающих воздействий при получении необходимых перемещений платформы стенда. Результаты исследований могут использоваться и быть востребованы в различных отраслях народного хозяйства.
ЛИТЕРАТУРА
Божко А.Е. Оптимальное управление в системах воспроизведения вибраций. Киев: Наук. думка, 1977.- 219 с.
Вибрации в технике: Справочник. В 6-ти т.- М:машиностроение, 1981. –Т.4 Вибрационные процессы и машины. – 509 с.
Широкополосные виброударные генераторы механических колебаний/ Крупенин В.Л., Веприк А.М. и др. Л.: Машиностроение, 1987. 76 с.
В.Л. Крупенин, А.Е. Божко, К. Б.Мягкохлеб
К АНАЛИЗУ МАТЕМАТИЧЕСКОЙ МОДЕЛИ И СТРУКТУРНОЙ СХЕМЫ ЭЛЕКТРОМАГНИТНОЙ ТРЕХКООРДИНАТНОЙ СИСТЕМЫ ВОЗБУЖДЕНИЯ ВИБРАЦИЙ // Научный электронный архив.
URL: http://econf.rae.ru/article/7864 (дата обращения: 16.02.2026).
 ентральным звеном в комплексе мероприятий по повышению надежности и улучшению эксплуатационных параметров технических изделий, предназначенных для работы в условиях интенсивных динамических нагрузок, являются вибрационные испытания [1-3]. Работа по созданию систем электромагнитного возбуждения механических колебаний, для вибрационных испытаний, а также для различных технологических процессов является актуальной, поскольку направлена на экономию времени и материальных затрат в процессе создания новых машин, на повышение качества и надежности технологического оборудования. Так же многокоординатные вибростенды играют важную роль в современной испытательной технике при решении задач повышения достоверности получаемых оценок, поскольку формируемые на них вибрации наиболее полно соответствуют эксплуатационным нагрузкам.
ентральным звеном в комплексе мероприятий по повышению надежности и улучшению эксплуатационных параметров технических изделий, предназначенных для работы в условиях интенсивных динамических нагрузок, являются вибрационные испытания [1-3]. Работа по созданию систем электромагнитного возбуждения механических колебаний, для вибрационных испытаний, а также для различных технологических процессов является актуальной, поскольку направлена на экономию времени и материальных затрат в процессе создания новых машин, на повышение качества и надежности технологического оборудования. Так же многокоординатные вибростенды играют важную роль в современной испытательной технике при решении задач повышения достоверности получаемых оценок, поскольку формируемые на них вибрации наиболее полно соответствуют эксплуатационным нагрузкам.